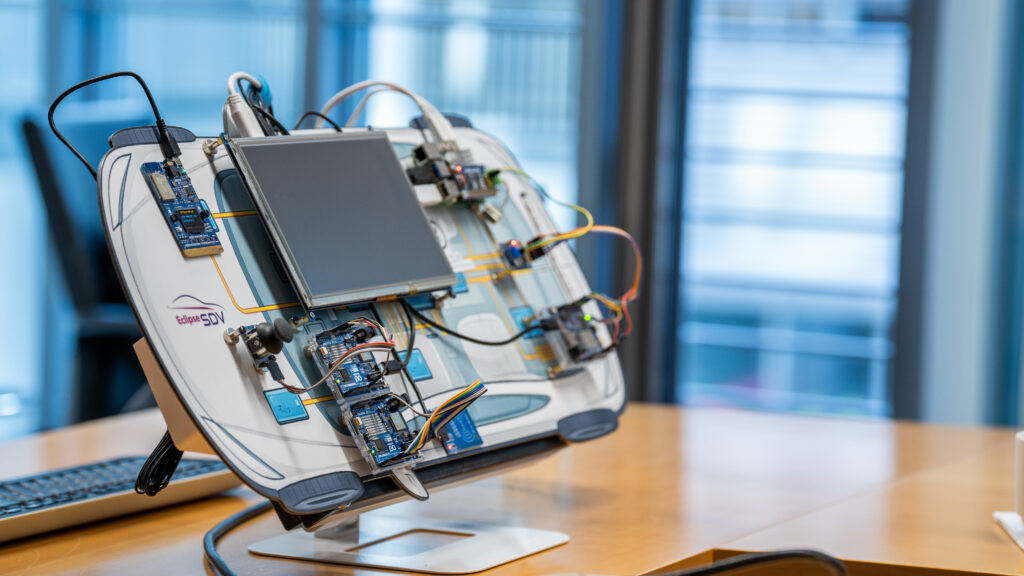
Those of you who’ve been at the Community Days in Bonn or Embedded World 2026 might remember the end-to-end demonstrator showcase shown by Eclipse SDV’s Technical Program Manager Christian Heissenberger: a compact but powerful illustration of how Eclipse SDV technologies can come together to form a coherent, end-to-end vehicle architecture. What was once a live demo on the show floor is now available to everyone as a fully documented, reproducible Eclipse SDV E2E Demo Blueprint.
What are Eclipse SDV Blueprints?
With its official publication, the Eclipse SDV Blueprints initiative takes another step toward its core mission: turning the abstract concept of the software-defined vehicle (SDV) into tangible, reusable implementations. The Eclipse SDV Blueprints project itself is designed to provide “real-world, composable use cases” that demonstrate how different Eclipse SDV components can be integrated into working solutions. Rather than building new technologies, the blueprints focus on combining existing ones into concrete, deployable scenarios that others can replicate, adapt, and extend.
E2E Demo Blueprint
The newly published E2E Demo Blueprint stays true to that mission. It evolves a physical demonstrator, combining in-vehicle signals, edge devices, and cloud services, into a structured reference implementation. At its core, the blueprint connects vehicle hardware, middleware, and backend systems into a seamless data flow, illustrating how signals move from in-vehicle components to fleet-level services and back.
Technically, the demo aligns vehicle signals with the COVESA Vehicle Signal Specification (VSS) and leverages key Eclipse SDV technologies such as the Eclipse Kuksa Databroker, Eclipse uProtocol, and Eclipse Ankaios for orchestration and communication. By integrating these building blocks, it demonstrates how SDV architectures can bridge embedded systems, edge compute, and cloud analytics in a consistent way.
Why blueprints matter
The value of the Eclipse SDV Blueprints project lies in its practical orientation. Each blueprint is intended to be reproducible, with clear documentation and deployment artifacts, enabling developers to “use blueprints as they are, for inspiration or as a foundation” for their own solutions. This lowers the barrier to entry for organisations exploring SDV architectures and accelerates experimentation across the ecosystem.
Blueprints also serve as integration testbeds. By bringing together technologies from across the Eclipse SDV Working Group – such as Eclipse Leda, Kuksa, Velocitas, and others – they expose real-world interoperability challenges and provide a feedback loop into the individual projects. The goal is not to prescribe a single architecture, but to provide working examples that evolve with community input.
E2E Demo Blueprint: A foundation for experimentation, exploration, and collaboration
The publication of the E2E Demo Blueprint highlights the growing maturity of the Eclipse SDV ecosystem. What starts as a conference demo can quickly become a shared, open asset for the community: documented, versioned, and ready to be reused.
For developers, integrators, and automotive stakeholders, this blueprint offers a hands-on way to explore how modern SDV stacks behave in practice. For the community, it reinforces a key idea: innovation in software-defined vehicles doesn’t happen in isolation, but through open collaboration, feedback loops, and shared, executable examples.
Have fun exploring and playing with the new E2E Demo Blueprint!


